
技術(shù)文章
Technical articles 熱門(mén)搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動(dòng)器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號(hào)解調(diào)/鎖相放大器等)
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
ER40-6/125截止波長(zhǎng)1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
CO2激光光譜分析儀
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號(hào)解調(diào)/鎖相放大器等)
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機(jī)
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
IRV2000-1X350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
熱門(mén)搜索:
P760/01_2760nm單模垂直腔面發(fā)射激光器
VCSEL-20-M激光控制驅(qū)動(dòng)器
ZNSP25.4-1IR拋光硫化鋅(ZnS)多光譜(透明)窗片 0.37-13.5um 25.4X1.0mm(晶體/棱鏡
HB-C0BFAS0832x4 QPSK C波段相干混頻器(信號(hào)解調(diào)/鎖相放大器等)
Frequad-W-CW DUV 單頻連續(xù)激光器 213nm 10mW Frequad-W
ER40-6/125截止波長(zhǎng)1300nm 高摻雜EDF摻鉺光纖
SNA-4-FC-UPC日本精工法蘭FC/UPC(連接器/光纖束/光纜)
CO2激光光譜分析儀
GD5210Y-2-2-TO46905nm 硅雪崩光電二極管 400-1100nm
WISTSense Point 緊湊型高精度光纖傳感器解調(diào)儀(信號(hào)解調(diào)/鎖相放大器等)
1030nm超短脈沖種子激光器PS-PSL-1030
FLEX-BF裸光纖研磨機(jī)
NANOFIBER-400-9-SA干涉型單模微納光纖傳感器 1270-2000nm
IRV2000-1X350-2000nm 1倍紅外觀察鏡
高能激光光譜光束組合的光柵 (色散勻化片)
S+C+L波段 160nm可調(diào)諧帶通濾波器
 更新時(shí)間:2025-09-24
更新時(shí)間:2025-09-24 點(diǎn)擊次數(shù):172
點(diǎn)擊次數(shù):172
鎖模激光器在很多領(lǐng)域已經(jīng)獲得了廣泛應(yīng)用,例如光學(xué)頻率梳、精密制造、光纖通信、激光雷達(dá)等。鎖模光纖激光器作為一個(gè)便捷的桌面化非線性系統(tǒng),在基礎(chǔ)科學(xué)領(lǐng)域也發(fā)揮著重要作用,例如鎖模光纖激光器為非線性科學(xué)研究提供了理想的平臺(tái)。由于鎖模激光器中存在復(fù)雜的鎖模區(qū)間,如何控制激光器的參數(shù)進(jìn)而訪問(wèn)特定的鎖模態(tài)是一個(gè)頗具挑戰(zhàn)性的難題。以常用的基于非線性偏振旋轉(zhuǎn)鎖模技術(shù)的飛秒光纖激光器為例,其在數(shù)學(xué)上是一個(gè)多維參量空間,實(shí)驗(yàn)上需要調(diào)諧至少7個(gè)參量(泵浦、損耗、色散、非線性和三個(gè)波片角度)才能遍歷整個(gè)參數(shù)空間。由于鎖模態(tài)和這些參量之間缺乏確定的函數(shù)關(guān)系,研究人員往往需要通過(guò)漫長(zhǎng)的試錯(cuò)過(guò)程來(lái)獲得想要的鎖模態(tài),并且手動(dòng)搜尋鎖模態(tài)的重復(fù)性差、精度低,給實(shí)驗(yàn)造成很大困難。
近年來(lái),機(jī)器學(xué)習(xí)方法在智能激光器設(shè)計(jì)方面展現(xiàn)出了巨大潛力,這種激光器可以自調(diào)節(jié)至所需的工作狀態(tài),無(wú)需人工調(diào)諧,解決了鎖模態(tài)控制難題,本文回顧和梳理了智能鎖模光纖激光器的原理和主要進(jìn)展。
二、關(guān)鍵研究進(jìn)展
1、孤子智能鎖模
孤子是傳輸時(shí)脈寬等參數(shù)保持不變的一種波包。利用孤子效應(yīng)可以在激光器中產(chǎn)生穩(wěn)定的超短脈沖激光。通信波段光纖中天然包含了產(chǎn)生孤子所需的兩種物理效應(yīng)——反常色散和克爾效應(yīng),因此光纖激光器是產(chǎn)生孤子、研究孤子物理的一個(gè)非常便捷的平臺(tái)。
(1)基于進(jìn)化算法的智能鎖模
進(jìn)化算法是在達(dá)爾文進(jìn)化論“適者生存"理念的啟發(fā)下提出的。在激光器中,利用進(jìn)化算法可以為設(shè)定的控制目標(biāo)(目標(biāo)鎖模態(tài))搜尋到適合的個(gè)體(激光參數(shù)),每個(gè)個(gè)體的優(yōu)劣由適應(yīng)度函數(shù)來(lái)評(píng)估,通過(guò)多次選擇、交叉、變異直至系統(tǒng)獲得最大適應(yīng)度。2015年,勃艮第大學(xué)Andral等人利用進(jìn)化算法次在被動(dòng)鎖模光纖激光器中實(shí)現(xiàn)了智能鎖模,基于激光強(qiáng)度和頻譜設(shè)計(jì)的適應(yīng)度函數(shù),可以確保每次鎖模均為基頻鎖模。
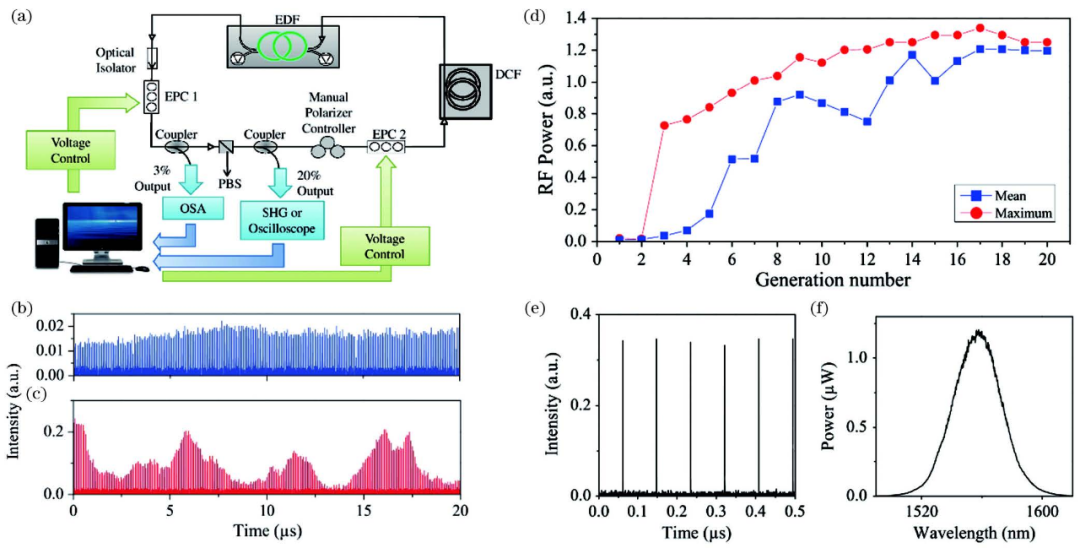
圖1 進(jìn)化算法實(shí)現(xiàn)智能鎖模[1]
(2)基于類(lèi)人算法的智能鎖模
進(jìn)化算法盡管應(yīng)用廣泛,但是激光器鎖模區(qū)參量空間分散,常常導(dǎo)致進(jìn)化算法運(yùn)算時(shí)間較長(zhǎng)。2019年,上海交通大學(xué)蒲國(guó)慶等人次實(shí)現(xiàn)了基于類(lèi)人算法的鎖模激光器,類(lèi)人算法通過(guò)引入激勵(lì)和懲罰機(jī)制模仿人的邏輯來(lái)調(diào)節(jié)偏振控制器,再通過(guò)隨機(jī)碰撞快速恢復(fù)鎖模。該激光器實(shí)現(xiàn)了迄今為止短的激光器啟動(dòng)時(shí)間(0.22 s)以及極短鎖模恢復(fù)時(shí)間(14.8 ms)。
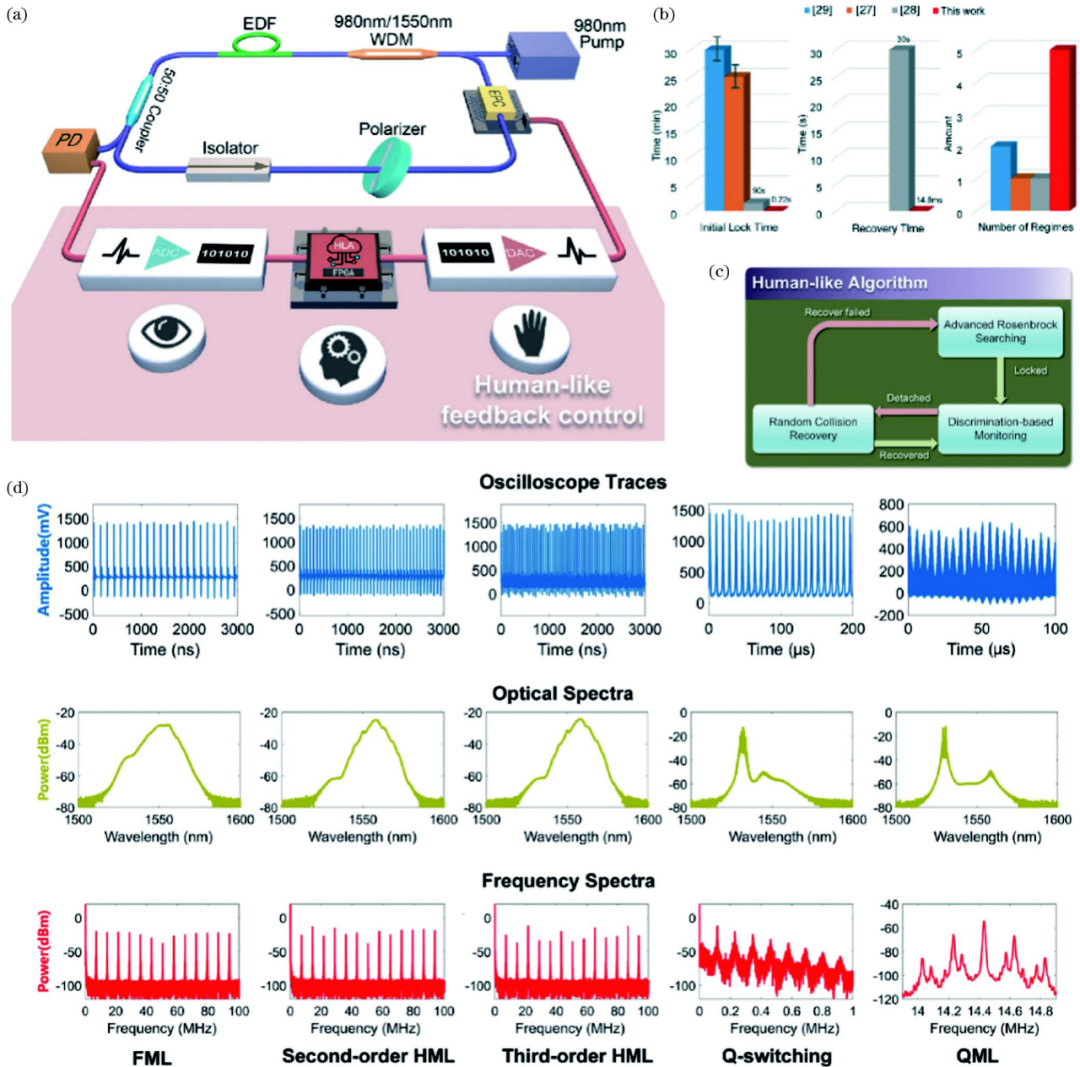
圖2 基于類(lèi)人算法的智能激光器[2]
(3)基于人工神經(jīng)網(wǎng)絡(luò)的智能鎖模
人工神經(jīng)網(wǎng)絡(luò)作為一種新興的數(shù)據(jù)分析和處理技術(shù),促進(jìn)了智能鎖模激光器的發(fā)展。利用神經(jīng)網(wǎng)絡(luò)在不同鎖模狀態(tài)下建立數(shù)據(jù)庫(kù)進(jìn)而訓(xùn)練模型,能夠?qū)崿F(xiàn)對(duì)激光器的穩(wěn)定控制和失鎖后的快速恢復(fù)。2021年,國(guó)防科技大學(xué)江天研究員團(tuán)隊(duì)針對(duì)自動(dòng)鎖模光纖激光器提出了一種低延遲的深度強(qiáng)化學(xué)習(xí)算法,利用該算法可以實(shí)現(xiàn)在不同溫度下,快速恢復(fù)激光器鎖模狀態(tài)。
2、鎖模激光器的光譜智能調(diào)控
超短脈沖的光譜調(diào)控常用方法是在腔內(nèi)加入濾波器實(shí)現(xiàn)對(duì)光譜的控制,但這一方案降低了激光器的集成度,并且濾波器也引入了較大損耗,導(dǎo)致激光器轉(zhuǎn)換效率較低。事實(shí)上,鎖模激光器通過(guò)調(diào)節(jié)自身參數(shù)也可以使光譜在一定范圍內(nèi)調(diào)諧。2020年,上海交通大學(xué)義理林教授團(tuán)隊(duì)利用遺傳算法次實(shí)現(xiàn)了對(duì)脈沖光譜和脈沖形狀的智能控制。該研究方法結(jié)合其它超快探測(cè)技術(shù),進(jìn)一步控制鎖模激光器其它參數(shù),如脈沖相位和時(shí)域波形等。
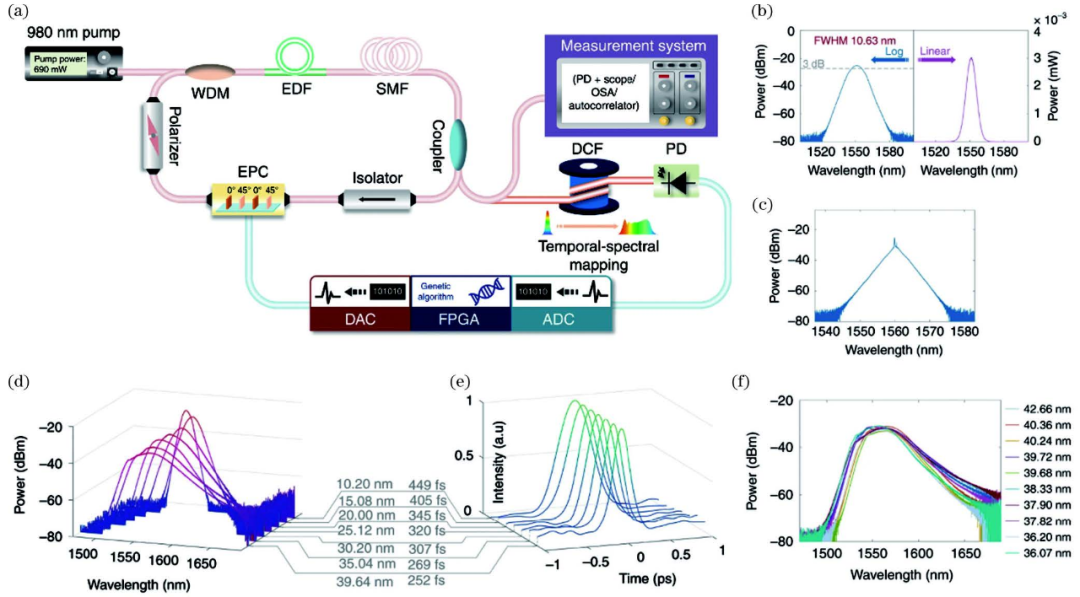
圖3 光譜寬度和形狀可編程的光纖激光器[3]
3、時(shí)空鎖模自調(diào)控
傳統(tǒng)鎖模是指激光縱模的鎖定。近有工作表明當(dāng)激光器中有多個(gè)橫模時(shí),也可實(shí)現(xiàn)橫模和縱模的同時(shí)鎖定,即“時(shí)空鎖模"。時(shí)空鎖模激光器突破了單模激光器的功率限制,具有重要前景。然而,多模激光器的參量空間隨著模式的增加幾乎呈幾何式增加,人工調(diào)諧已很難滿足需求,極大限制了時(shí)空鎖模技術(shù)的發(fā)展。2020年,華南理工大學(xué)韋小明教授等人利用智能化控制技術(shù)很好地解決了這一問(wèn)題,將波前整形技術(shù)和遺傳算法相結(jié)合,實(shí)現(xiàn)了多模激光器的時(shí)空鎖模,并且實(shí)現(xiàn)了對(duì)多模光斑的智能控制。
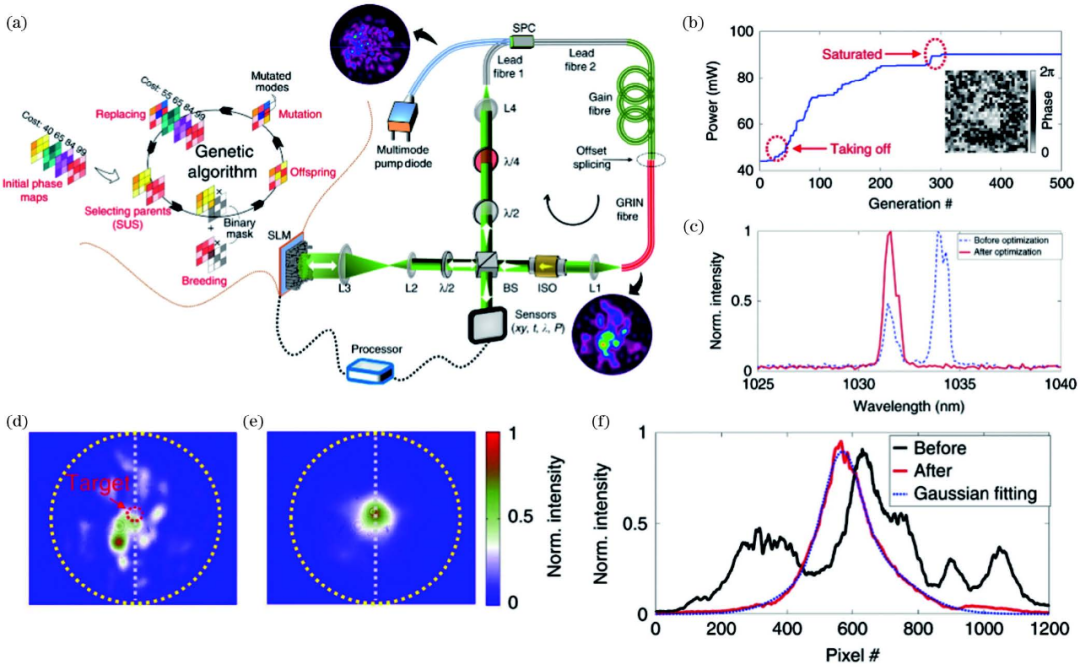
圖4 多模智能光纖激光器[4]
4、呼吸子智能調(diào)控
近些年來(lái),呼吸子超快激光取得了快速發(fā)展。傳統(tǒng)鎖模激光器輸出的是一系列等同的超短脈沖(孤子脈沖),呼吸子激光器輸出的脈沖參數(shù)如能量、光譜、脈寬等會(huì)隨著時(shí)間周期性變化,因此被稱(chēng)為“呼吸子"(或者脈動(dòng)孤子)。2021年,華東師范大學(xué)吳修齊等人利用遺傳算法次實(shí)現(xiàn)了激光器中呼吸子多維度的智能調(diào)控,具體包括呼吸比、呼吸周期、呼吸子數(shù)量,并借助該工具研究了多脈沖呼吸子的超快動(dòng)力學(xué)過(guò)程。通過(guò)將激光器色散調(diào)整至近零色散,會(huì)產(chǎn)生分形呼吸子,分形呼吸子比普通呼吸子呼吸頻率穩(wěn)定性提升超3500倍。2022年,該團(tuán)隊(duì)結(jié)合智能控制系統(tǒng)次實(shí)現(xiàn)了分形呼吸子的智能控制[5-6]。
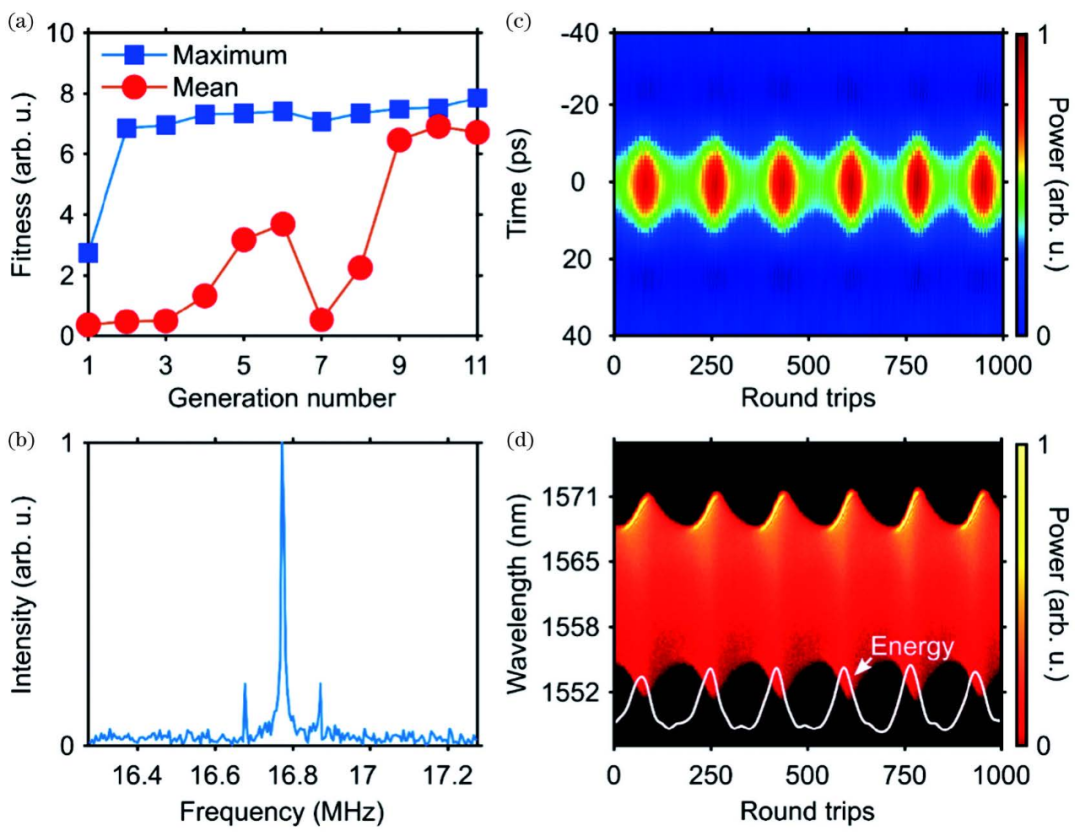
圖5 單呼吸子智能搜尋結(jié)果。(a)基于遺傳算法的平均(紅色圓圈)和大(藍(lán)色方塊)適應(yīng)度值演化;(b)~(d)優(yōu)化下?tīng)顟B(tài)的特征:(b)呼吸子頻譜;(c)腔內(nèi)往返光譜的時(shí)空演化圖,白色曲線代表能量;(d)腔內(nèi)往返脈沖時(shí)域的時(shí)空演化圖
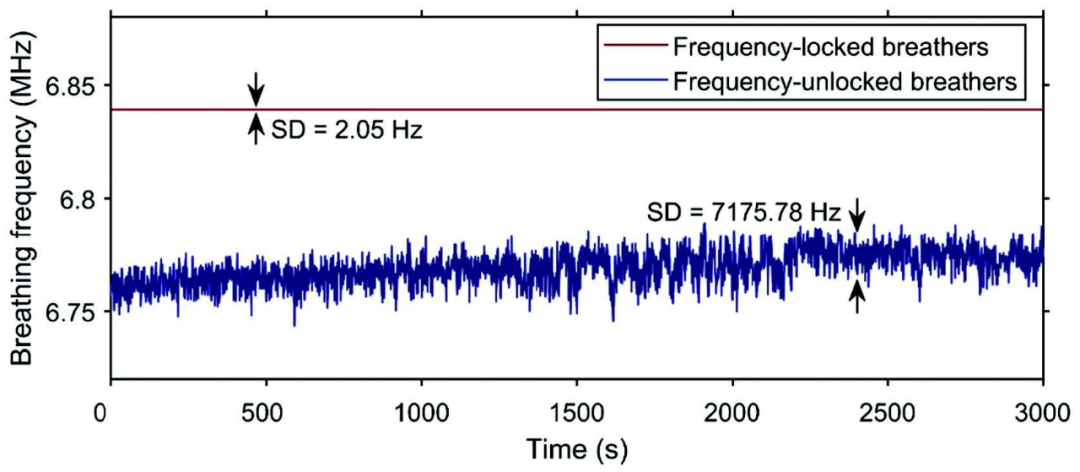
圖6 鎖定呼吸子和未鎖定呼吸子頻率隨時(shí)間的變化,其中SD為標(biāo)準(zhǔn)差
三、總結(jié)與展望
本文回顧了智能控制技術(shù)在被動(dòng)鎖模光纖激光器中的應(yīng)用。基于智能控制技術(shù),激光器可以實(shí)現(xiàn)對(duì)鎖模態(tài)的自動(dòng)化產(chǎn)生和控制,不需要手動(dòng)調(diào)諧,縮短了調(diào)諧時(shí)間,提升了調(diào)諧的精度以及鎖模態(tài)的可重復(fù)性。這種自?xún)?yōu)化的超短脈沖激光器在某些特殊環(huán)境下也具有一定的應(yīng)用前景,包括遺傳算法在內(nèi)的一系列智能算法有望應(yīng)用于其他更為復(fù)雜的鎖模態(tài)的智能化控制。此外,當(dāng)前智能控制技術(shù)的重點(diǎn)在于控制激光器,實(shí)現(xiàn)激光器的自動(dòng)調(diào)節(jié)。智能控制技術(shù)能否對(duì)激光物理產(chǎn)生影響是一個(gè)開(kāi)放性問(wèn)題。
參考文獻(xiàn): 中國(guó)光學(xué)期刊網(wǎng)

您好,可以免費(fèi)咨詢(xún)技術(shù)客服[Daisy]
筱曉(上海)光子技術(shù)有限公司
歡迎大家給我們留言,私信我們會(huì)詳細(xì)解答,分享產(chǎn)品鏈接給您。
免責(zé)聲明:
資訊內(nèi)容來(lái)源于互聯(lián)網(wǎng),目的在于傳遞信息,提供專(zhuān)業(yè)服務(wù),不代表本網(wǎng)站及新媒體平臺(tái)贊同其觀點(diǎn)和對(duì)其真實(shí)性負(fù)責(zé)。如對(duì)文、圖等版權(quán)問(wèn)題存在異議的,請(qǐng)聯(lián)系我們將協(xié)調(diào)給予刪除處理。行業(yè)資訊僅供參考,不存在競(jìng)爭(zhēng)的經(jīng)濟(jì)利益。
 當(dāng)前位置:
當(dāng)前位置:
